 |
|
|
BALLON SOUPAPE 1 |
Ballon Air Chaud Solaire de 4 mètres.
Projet Soupape pour régulation de l'altitude :
Depuis longtemps la soupape a été un moyen primordial, pour faire varier l'altitude du ballon, encore nommé à l'origine : aérostat.
La soupape peut évacuer du gaz, de l'air chaud ce qui permet au ballon de descendre. Le jet de lest ou l'emploi de brûleurs à gaz permet au ballon de reprendre de l'altitude. Dans le cas d'un ballon solaire, si la soupape se ferme alors l'air interne se réchauffe sous l'effet du soleil et la force ascensionnelle augmente, le ballon s'élève. On voit tout de suite que ce type de ballon ne consomme pas de lest, masse qu'il faudrait embarquer au départ du vol et ne consomme pas d'énergie sous forme de gaz à brûler qui représente aussi une certaine masse non négligeable à embarquer au décollage.

Il est possible de faire varier l'altitude du ballon et de chercher les courants aériens propices à la navigation. Les cartes des vents sont disponibles sur les sites météo, il reste à faire un choix en temps réel pour déterminer une trajectoire appropriée.
Cette technique est encore utilisée pour les vols de courte distance et elle a été mise en œuvre avec succès par Bertrand Piccard pour son tour du monde en ballon en 21 jours. Dans ce cas précis et compte tenu des distances importantes à parcourir, il fallait des prévisions de vent à 5 jours! Le problème était alors le suivant :
--- trouver les directions des vents pour pouvoir partir d' un point A et aller à un point B.
Exemple : départ point A en Suisse et premier point à relier B au Maroc, ensuite cap vers l' Est par la Lybie, l'Egypte, le Yémen ....et retour en Egypte.
--- trouver une succession de points A, B, C.... autour de la planète pour revenir au point A. Toute rupture ou impossibilité de relier un point à un autre aboutit à l'échec dans la tentative de faire un tour complet. Il faut pour réussir, établir des centaines de cartes des vents et un excellent météorologue : Luc Trullemans en l' occurrence. Il y avait un "routeur" à Genève et un "navigateur" dans le ballon pour contrôler et exécuter les changements d'altitude à 100 mètres près.
Pour revenir au modeste ballon solaire de 4 mètres de diamètre, l'objectif est de s'éloigner du concept "ballon-sonde" traditionnel et de se rapprocher du concept "mini montgolfière aérostat" avec une "navigation"
d'un point A vers un point B.
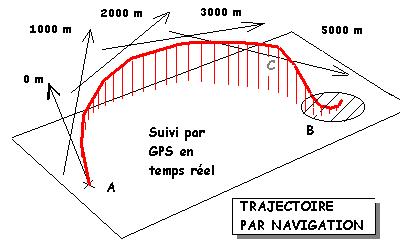
La zone B est "choisie" avant le vol dans un espace sécurisé autant que possible, le suivi de la trajectoire se fait par GPS embarqué dans la nacelle, les données sont transmises en temps réel par radio ainsi que les paramètres "météo". Ainsi les mesures atmosphériques réalisées par les différents capteurs sont exactement situées dans l'espace en 3 dimensions. Coordonnées :x, y et z ainsi que les mesures représentées par des nombres (octets) de 0 à 255 pour N1, N2,.......N16.
On s' éloigne du concept de ballon-sonde (trajectoire inconnue) et du concept "voltmètre" dans l'espace (mesures prises on ne sait pas où exactement).
1. Comment "réguler" l'altitude ? Il s'agit d'un asservissement :

Nous connaissons la régulation de température pour un chauffage, ici c'est un moteur électrique (ou un servo-moteur) qui actionne une soupape au sommet du ballon de type "parachute". Le système décrit ci-dessus fonctionnera en mode Tout ou Rien (TOR), c'est à dire que la soupape sera ouverte ou fermée sans position intermédiaire.
La "consigne" (altitude à atteindre) est représentée par une tension issue d'un potentiomètre programmable : Hc.
Le capteur de pression absolue est une capsule classique qui délivre une tension de 0 à 5 volts : H suivant la pression atmosphérique P. Il est utile d'avoir une courbe d'étalonnage de ce capteur. Voir capteur de pression.
Le "comparateur" donne la différence (Hc - H), c'est donc l'erreur par rapport à la valeur de consigne, en positif ou en négatif.
L' "interface" qui suit le "comparateur" délivre une tension de commande :
Vs égale à +10V pour donner l'ordre de fermer la soupape et Vs égale à -10V pour donner l'ordre d'ouvrir la soupape. Cette interface prend en compte le capteur de la soupape qui indique si celle-ci est dans l'état ouvert ou fermé.
Voir les schémas pages suivantes.

|
|
©2002 concept par SIECLE21 toute reproduction autorisée si mention du site.01/01/2014 |